
Éric LE CARPENTIER, Yannick AOUSTIN (équipe REV), Konstantin AKHMADEEV, Tianyi YU, Clément HUNEAU, Olivier BORDRON
L’objectif à moyen terme est le pilotage de mains robotiques, s’appuyant sur une décomposition fine des signaux électro-myographiques (EMG), de façon à permettre une manipulation fine et proportionnée. Un modèle markovien de tels signaux est développé.
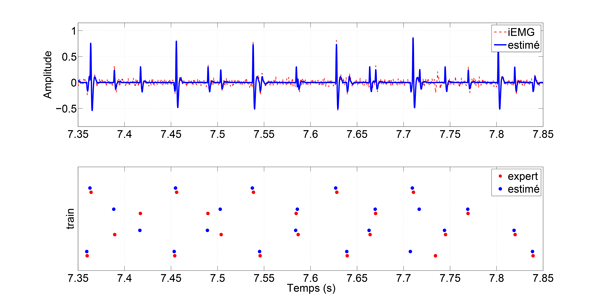
L’algorithme de décomposition existe et a une structure récursive en temps, en tant que version approchée du filtrage bayésien ; il s’appuie sur la simulation d’un certain nombre de scénarios, à l’image du nombre de particules dans un filtre particulaire. L’implantation en temps-réel reste à faire, et on compte s’appuyer sur la programmation spécifique de processeurs parallèles, car la structure de l’algorithme y est adaptée. Ce type d’implémentation doit permettre d’augmenter le nombre de scénarios joués en parallèle, ce qui permet d’envisager la décomposition de signaux EMG de surface, réputés plus difficile que les signaux EMG intra-musculaires traités jusqu’à présent. Ensuite, la correspondance entre la décomposition des EMG et la commande effective de la prothèse reste à faire, mais nous disposons de modèles musculaires permettant d’envisager une commande la plus naturelle possible pour le patient appareillé. Deux thèses de doctorat sont en cours de démarrage (2015-2018) avec des sujets consacrés à ces questions. Une troisième thèse (2016-2019) est co-encadrée avec l’équipe REV autour de la commande d’exosquelettes pour l’assistance à la marche.